服务热线
400 920 5548
在汽车电子和汽车发展迅猛的背景下,用户对于汽车智能化的要求慢慢的升高,汽车的基础功能也慢慢变得复杂。庞大的系统要在足够可靠的环境下根据其功能行驶,才能在确保安全的同时提升用户驾驶体验。
2024年5月23日,在第七届智能驾驶与人机共驾论坛上,dSPACE业务发展经理李雪琪介绍,对于无人驾驶测试而言,模型和场景十分关键,dSPACE有自研的ASM车辆模型库,能够几乎白盒交付给用户,用户都能够看到最底层的框架搭建,也能够直接进行二次开发。
ASM车辆动力学模型中所包含的车型十分丰富,如乘用车、卡车、商用车等,用户都能够进行自由选择。除常见的交通参与物外,该模型还引入了智能驾驶员交通模型模块,可以帮助用户在CNCAPS/NCAPS新车车规测试要求中进行应用。

dSPACE是世界领先的仿真验证供应商,主体业务覆盖车联网,无人驾驶及电动化领域的研发验证。公司总部在德国,也是全球最大的研发中心,拥有超过1800名软件专家和工程师。
随着汽车电子技术的发展,传统的EE架构也正在向域控制器和中央控制器结构演变。这一演变涉及控制器软件的分层解耦、通信复杂度的提升以及高带宽的利用。
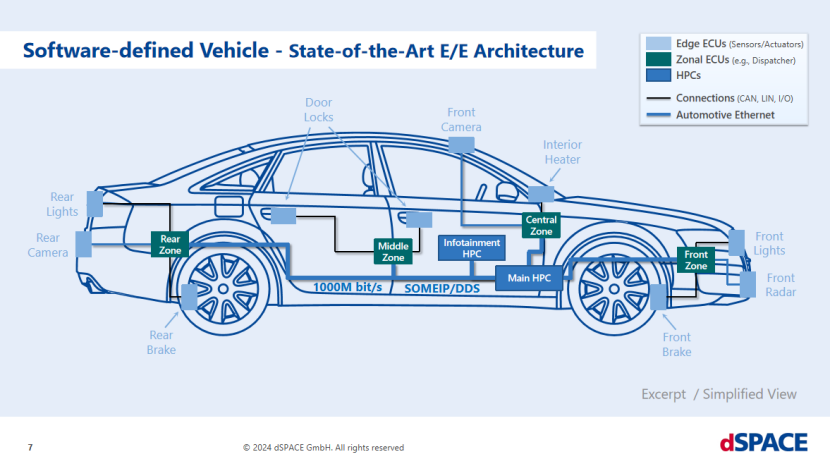
同时,伴随通信网络从CAN/LIN总线向车载以太网SOME/IP和DDS分布式系统的发展,为满足智能驾驶车辆对高算力和高通信带宽的需求,行业面临着从需求定义到研发框架开发、软硬件实施及集成测试等多方面的挑战。
因此,在SDV大背景下,传统架构的测试仿真流程正逐步转变为基于软件迭代和数据驱动的开发测试流程。dSPACE凭借30多年的行业经验,为客户提供从MIL,SIL到HIL的全栈仿真工具链,以适应这一变化。dSPACE帮助客户根据研发阶段、时间成本、系统可靠性和复用性等因素,选择最适合的测试与仿真策略。在软件交付迭代周期日益缩短的背景下,致力于在硬件尚未就绪时,通过早期验证和测试来发现和修复软件中的bug,这是确保项目成功的关键。
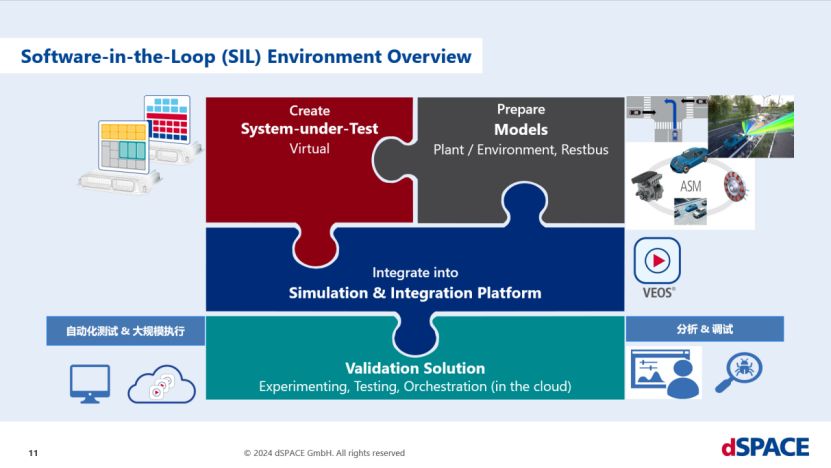
SIL平台与开发团队的开发平台相结合,构建CICT集成开发与测试工具链。dSPACE的软件在环仿真工具链能够最终靠仿真拼图去描述,帮助用户理解每个部件的工作原理。通过创建待测对象、准备测试所需的场景、车辆及传感器模型,并将其部署在仿真平台上,进行集成测试。在仿真过程中,利用自动化测试工具和上位机软件观测和分析问题,并进行调试,以确保软件的质量和性能。
智驾软件的核心在于从多种传感器获取原始数据,如摄像头图片帧、激光雷达和毫米波雷达的点云,这一些数据经感知融合算法处理后,通过规划决策和控制算法,最终生成执行器所需的指令,如刹车、加速等,从而完成无人驾驶行为的执行。
以ADAS Software的常见架构为例,智驾控制器系统通常由SoC/HPC和MCU共同构成。SOC端负责实现算力要求高的感知融合算法,而MCU端则专注于实时性要求高的控制算法。在软件层面,这些系统可分为上层应用层软件、中间件、操作系统及底层相关代码。
在软件在环仿真中,dSPACE致力于确保待测对象尽可能接近真实控制器。为此,我们引入了虚拟ECU概念。dSPACE可以依据用户测试需求,在不同层级间进行切割和剥离。对于上层,展现真实的待测算法表现;对于下层,通过dSPACE的软件和工程服务实现虚拟化,并将其部署在仿真平台上。这不仅连接仿真平台,还模拟真实控制器中的通信模块和持续调度模块的运行机制,使V-ECU更接近真实控制器的软件表现。
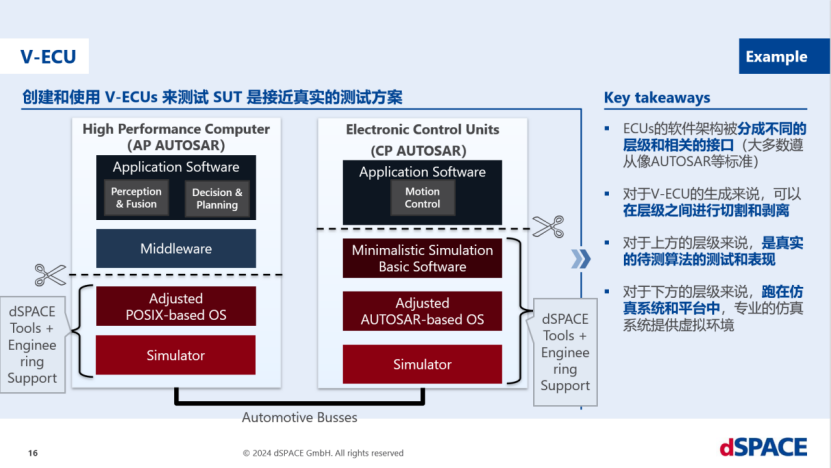
以CP AUTOSAR为例的虚拟ECU,可设置不一样等级。若用户仅关心应用层软件测试,level 1级虚拟控制器即足够。level 2为过渡,level 3则更接近真实控制器,包含应用层、中间件和基础软件。对于运行感知融合的HPC或SoC,也有相应层级划分。若需level 3+的虚拟HPC,需打包应用层、基础功能软件及操作系统进行镜像,通过工具链和工程服务部署在仿真硬件平台如QEMU或云端,利用云端资源进行真实控制器级别的仿真。
除了虚拟ECU,无人驾驶测试的另一关键是模型和场景。dSPACE拥有自研的ASM车辆模型库,可白盒交付用户,支持底层框架查看和二次开发。此外,ASM以及物理级传感器仿真平台均经过南德TÜV ISO 26262安全认证,可协助OEM合作伙伴进行相应认证。ASM车辆动力学模型涵盖多种车型,如乘用车、卡车和商用车,用户可自由设定主车和交通流中车辆的行为。在ASM交通模型中,我们还引入了智能驾驶员模块,以满足CNCAPS/NCAPS新车车规测试要求。

在传感器仿真领域,我们自研了一款强大的3D仿真软件——AURELION,它具备两大核心技术。首先,它利用Unreal游戏引擎和GPU加速技术,实现了高质量的图像渲染,使得我们也可以动态改变天气条件,如雨量大小和光照信息,为驾驶模拟器和摄像头激励测试提供逼真环境。
AURELION集成了三类传感器模型:摄像头、毫米波雷达和激光雷达。摄像头模型同样基于游戏引擎进行渲染,我们为用户更好的提供开放的传感器模型,允许用户自由设置如成像效果和暗晕、色差等参数。对于毫米波和激光雷达这类射线类传感器,我们运用光线追踪技术进行仿真,确保传感器性能的真实反应。
特别有必要注意一下的是,射线类传感器对障碍物反射散射等属性受物体材质影响显著。为此,我们与德国FRAUNHOFER研究所合作,创建了物理材质属性库,用户可直接设置交通参与物的材质属性,以测试传感器在不同材质下的反应。
为了使传感器模型更加贴近真实表现,我们积极与业内传感器原厂伙伴建立合作伙伴关系,如RoboSense和Hesai等激光雷达制造商。AURELION集成了这些合作伙伴的激光雷达模型,生成的数据与真实传感器数据高度一致,为客户提供便捷的测试体验。
在集成运行方面,dSPACE将待测件和仿真模型部署在dSPACE的VEOS软件仿真平台上。VEOS支持Windows X86和Linux平台,不仅适用于智能驾驶域控制器,还可将整车底盘或别的需要联合测试的域控制器集成在同一平台上,实现虚拟整车测试。
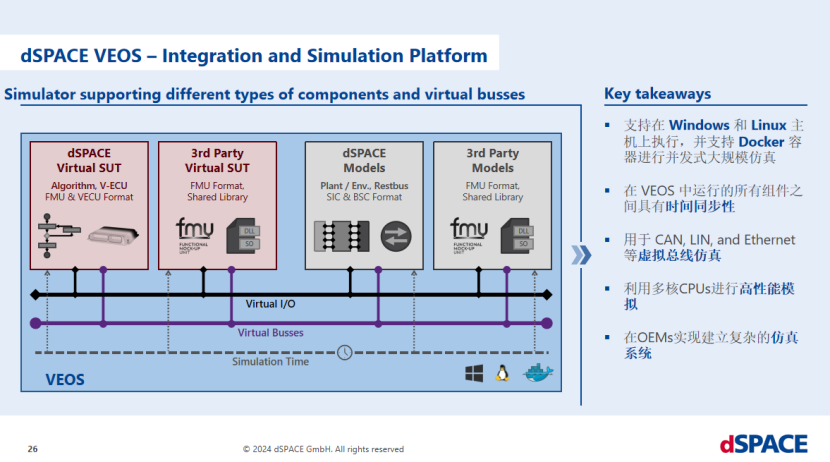
在SIL的领域中,其显著优点是无需如HIL那样严格确保实时性,而仅需关注同步性。VEOS平台为此提供了同步时钟,确保所有运行在平台上的模型和待测件拥有统一的授时。此外,SIL不需要仔细考虑实时性,意味着仿真和测试过程能轻松实现加速。在普通电脑上,我们已观察到3至4倍的加速效果,而在更强大的服务器硬件上,加速效果更为显著。
我们提供了Control Desk作为上位机软件,用于访问仿真平台上的总线信息,实时观测总线数据,并在虚拟或真实ECU待测件上执行测量、标定和诊断功能。Control Desk还可用于智能驾驶和规控算法的测试的观测,通过轻量化的界面设计,使用二维视图观测车辆行为轨迹。
为了满足多种项目和测试需求,上位机能够连接用户的生命周期管理系统,定制化生成测试报告,并发送给测试工程师或研发工程师。若单机软件在环仿真加速仍不满足需求,我们可将整个软件在环工具链部署至云端,采用Docker容器化技术。
dSPACE的SIMPHEAR云端仿线认证,支持公有云、私有云或企业服务器部署,实现大规模集群化测试,满足智能驾驶高里程数测试需求。其轻量级网页界面允许用户无需安装复杂软件即可获取测试状态和结果,很适合跨地域协同办公场景。

SIMPHEAR的两种部署模式包括:在数据量要求不高时,可将仿真平台、待测件和车辆模型部署在同一Docker容器中;对于大数据量需求,可将不同仿真组件分别部署在多个Docker容器中再上传至云端。以真实用户案例为例,SIMPHEAR云端仿真工具在并发仿线条AEB测试运力,而单机版工具仅能完成3-4个,凸显了云端测试工具链在大数据量测试中的显著优势。
(以上内容来自dSPACE业务发展经理李雪琪于2024年5月23日在2024第七届智能驾驶与人机共驾论坛发表的《SDV环境下基于软件在环的智驾仿真测试解决方案》主题演讲。)
地址:上海市松江区振业路280号1号楼2层
电话:400 920 5548
邮箱:sales@sataton.com
